

An action engine is my term for a functional global which includes extra actions other than just holding the data. I was originally exposed to the term “Action Engine” by reading the book “LabVIEW Applications Development A Course on Advanced LabVIEW Programming Techniques.*” But before I get into details of the Action Engine (AE), I would like to clarify some terminology.
Functional Globals
Functional Globals (FG) are VIs that are functionally equivalent to LabVIEW globals. Functional Globals store information. Basically, you can read or write them. Not really that fancy. Functional Globals are also referred to as LV2 globals, because LV2 did not have globals, but it did support Un-initialized Shift Registers (USRs). The USR is the entity that stores the information.
USR’s
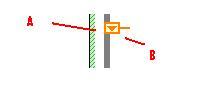
Shift Registers (SR) come in two varieties “Initialized” and “un-initialized”. The presence or absence of a wire feeding the SR from outside the loop distinguishes how LabVIEW will implement the SR. If there is NO wire feeding a shift register (A), then the SR is not initialized. This is called an “Un-Initialized Shift Register”. The USR variety is implemented as a static buffer that is re-used from call to call. The values written to the “USR in” and earlier calls persist for access (B) for later calls**. A Functional Global exploits this behavior by implementing two methods of interacting with the contents of the USR.
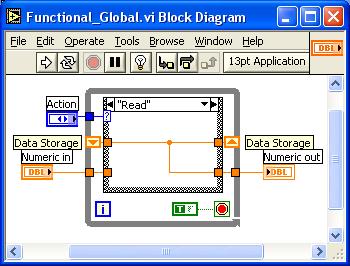
In the “Write” action (not shown) the value of “Numeric in” is placed in the USR. In the “Read” action the contents of the USR are returned via Numeric out.
Action Engines
An Action Engine (AE) can be thought of as a machine (Engine) that performs some useful task (action) often on something (typically, but not limited to, data in a USR). Functional Globals are very specific types of Action Engine. They have two actions “Write” and “Read”. They operate on the data stored in the USR either by replacing or using the contents of the USR. So, AE’s are a superset of Functional Globals. In many documents the terms AE and FG are interchangeable. A recent poll on LAVA has indicated that Functional Global is the most popular term. Since this blog post was started by answering the question “what is an AE?,” throughout this post you will find that I generally use the term AE.
Do What to What?
AE design revolves around the ways the shared resource must be accessed, manipulated, or monitored. In a Functional Global, the actions “Write” and “Read” are appropriate. That is not necessarily the case for AEs. AEs can have an entirely different set of actions depending on the interaction requirements for the information stored in the USR.
Examples of information stored include:
- A Configuration AE could allow for multiple processes to share a single copy of the system configuration (in a USR) by providing actions like “Set Device ID”, Set Device ON-Line
- A hardware device can be realized as an AE that presents actions appropriate to the physical phenomenon being measured or controlled.
- A DO Port Controller AE could store a reference to the physical device in one SR and the port status in another SR and have actions like: Set Main Motor On”, “E-Stop”
- An Instrument can be implemented to store the device name and settings with actions like “Set Input ON,” “Auto-Scale Y,” and “Get Trace”
- Screen Stacks can be implemented by using control references in one USR and maintain a screen view stack in another then implementing actions like “Set Config Screen”, “Set Login Screen”, “Back”
- Users can be managed the use of an AE with actions such as “Add New User” “Set Password”, “Disable User”
The list goes on and is limited only by our imagination. Here is an example that shows how a running average can be maintained.
Running Average Example
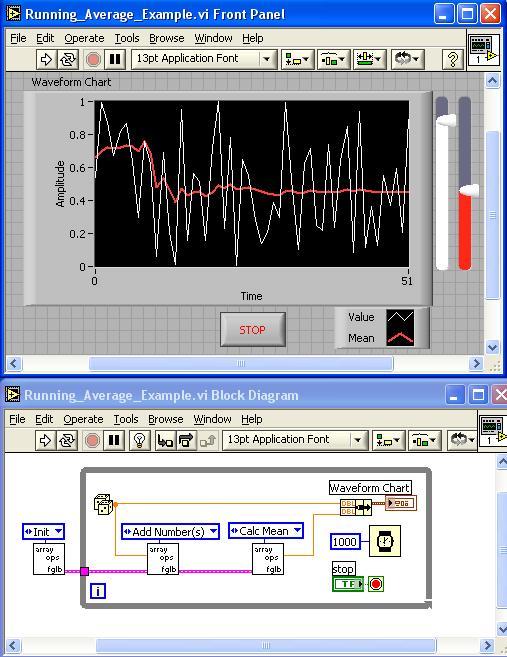
The Running Average example shown above shows how a running average can be maintained using an AE. The AE is initialized before the While Loop executes. On each iteration of the loop the simulated measurement value (random number) is used to update the history of all measurements (Add Number(s)) and the mean is calculated (Calc Mean). Please note that although the buffer of all measurements is affected in every step of this example, the buffer (USR in the sub-VI) contents are never part of this VI’s diagram. Since the history is stored in the sub-VI, the history can be acted on from more than one thread as shown below.
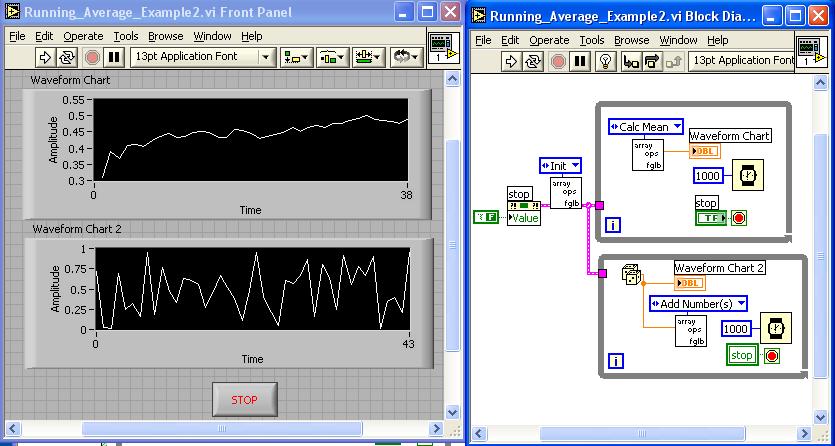
In the Parallel Loops example the history is initialized and then two loops run in parallel with one updating the history and the other plotting the average. Since the history resides inside the USR of the sub-VI, the two while loops are effectively sharing the same block of memory; the block used to store the USR. The Sub-VI was implemented as shown in the following sequence of images.
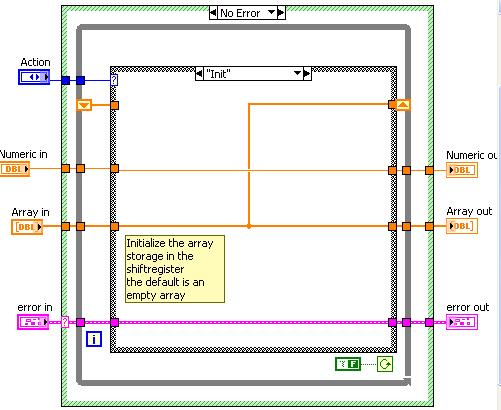
As was the case with Functional Globals, the actions are implemented as a type def’d enum***** driven case structure. Appropriate code is present in each case to realize the intended actions. In the “Init” case, contents of “Array in” are used to initialize the history. In the example above we did not pass an initial array value. Therefore the “Init” resets the history (cleared the array).
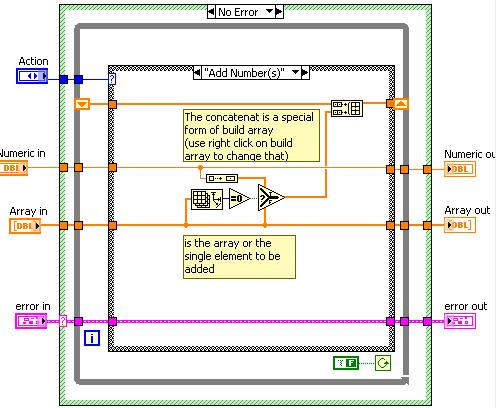
The operation of the AE when the “Add Number(s)” action is called varies depending on its usage. If the caller passes a non-empty array, it is appended to the array. Alternatively, passing a value via the “Numeric in” control, and leaving the “Array in” unwired adds a single element to the history. We used the “Numeric in” input so we were continually building our history one value at a time.
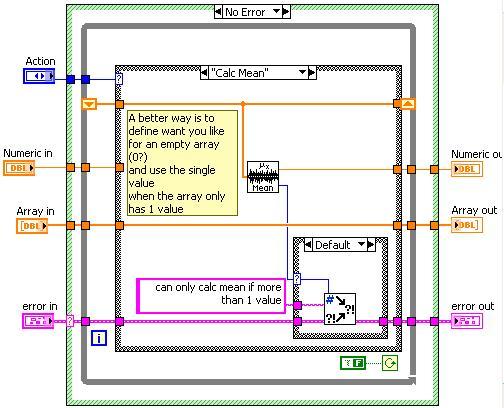
When the “Calc Mean” action is invoked, the average is calculated and returned.
The Traffic Cop Behind the Scenes
I have not mentioned until now, that AEs should be implemented as VIs that are not reentrant***. VIs that are not reentrant can only be executing in one context at a time. LabVIEW will ensure that if there is ever a situation were two contexts are attempting to act on the same AE at the same time, LabVIEW will schedule the first and the subsequent will wait until the first call completes. This is similar to a traffic cop preventing more than one vehicle from entering an intersection at the same time. The traffic cop is illustrated in the following timing diagram where we look at how the processing of two threads is affected by using a single AE.
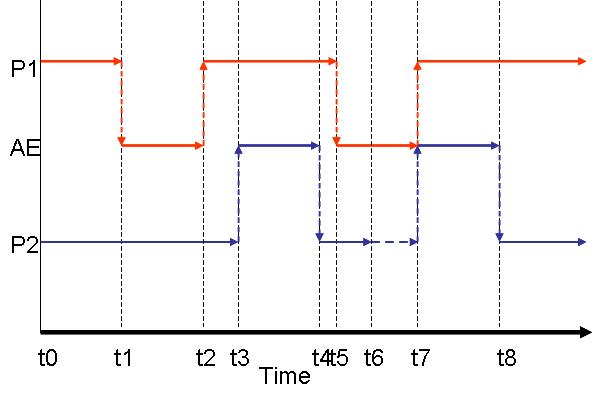
In the figure above the processing time of two processes “P1” and “P2” are illustrated by a red or blue solid arrow respectively. In the “Parallel Loops” example shown earlier, P1 could be the “Calc Mean” loop and P2 could be the “Add Number(s)” loop.
t0 – t1
Both processes are executable and run their assigned tasks. Neither process is accessing the AE
t1 – t2
P2 continues to run while P1 calls the AE. Since the AE is idle it is available to run so P1 continues execution running inside the AE until all work inside the AE completes. The dotted arrow shows that the thread for P1 is executing in the data space allocated for the AE.
t2 –t3
At t2 the AE terminates and both process run as in t0 – t1.
t3 – t4
This time segment is similar to t1 – t2 with P2 running in the AE.
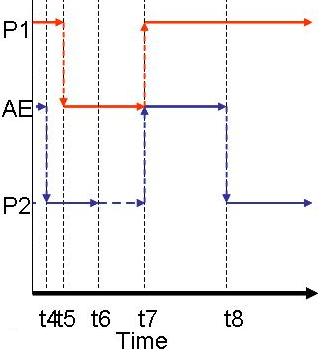
t4 – t5
Similar to t2 – t3 the AE terminates and both process run.
t5 – t6
Similar to t1 – t2. P1 take control of the AE.
t6 – t7
At t6 P2 attempts to call the AE. Since the AE is not idle it is not available to run. P2 is placed in a resource wait state (it is NOT running) waiting for the resource to become available. The dotted horizontal arrow indicates the process is not executing.
t7 –t8
At t7 the call of the AE by P1 that started at t5 completes and P1 continues to execute outside of the AE. When the call by P1 completes the AE becomes available. The process P2 is marked as executable. The scheduler includes P2 in its executable threads and the AE is available. P2 then executes inside the AE until the call completes.
The Beauty of the AE
This behavior of a non-reentrant VI is a wonderful feature we can exploit to eliminate race conditions. Race conditions are the nemesis of many developers. In hardware this was solved with clocked enabled logic. In LabVIEW we solve race conditions with Queues, Semaphores, Rendezvous, Occurrences, and Action Engines! AEs can eliminate race conditions when all operations involving updates of the data stored in the USR are done inside the AE. A very simple illustration of how the encapsulation of USR manipulation is shown in the following set of examples.
This VI is intended to demonstrate how two bits of an eight-bit port can be used to control the running state of two pumps. To illustrate the control process, one pump will be set running at start-up and then every half second the state of both pumps will be toggled to simulate switching of the supply. This example uses globals and fails miserably.
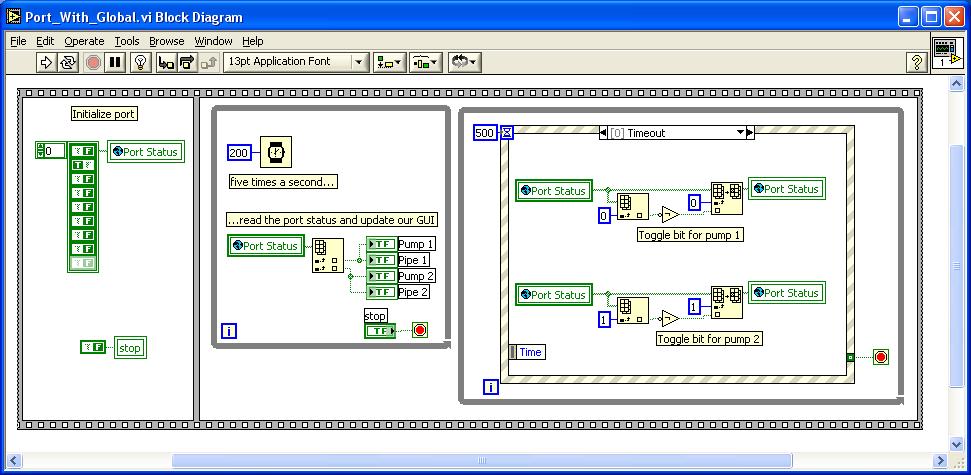
In this example we start out by initializing a global variable so that bit “1” (zero based) is the only bit set in an array of eight bits. This turns on Pump 2 to start. Then the “Port Update” and a “State Change” loops run in parallel. In the “Port Update” loop the state of the port is read from the global and used to update the GUI.
In the “State Change” loop, the port status is read and the first Boolean is inverted before being written back to the global. Similarly for the second Boolean. Since the read of the globals both occur before the subsequent data processing, one of the threads will be processing old data.
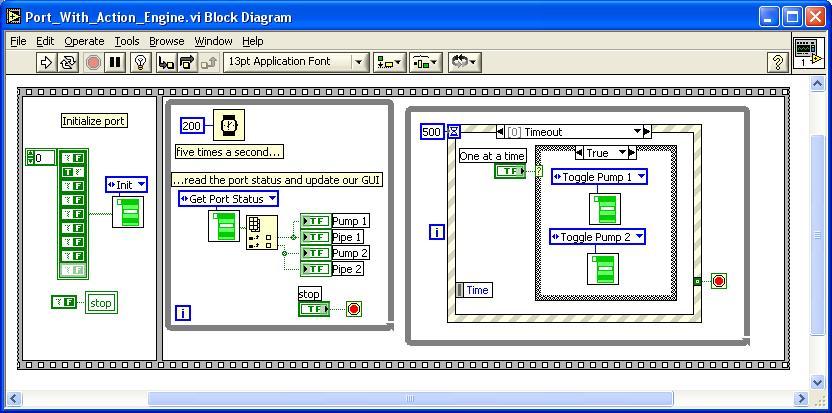
The Action Engine version codes up the same way as the global version but now all of the data manipulation of the port states are encapsulated in the Action Engine “Port Controller.” This encapsulation ensures all operations involving the data in the USR are forced to happen sequentially even though we did not have to implement any code to achieve this affect.
The key point to take away from this example is a shared resource (the port status in the case) when implemented as AEs comes with resource contention resolution built-in provided that all manipulation of the shared resource takes place inside the AE.
Action Engines to the Rescue
Action Engines are not a replacement for Queues, Rendezvous, and the other synchronization techniques. They are typically called for when your design dictates that a single resource must be shared by more than one parallel process and none of the LabVIEW provided techniques are sufficient. They require a design of their own to ensure they work correctly. They also have to be developed and supported.
Wrapping it Up
After submitting this post for review by my fellow Champions, Jim Kring mentioned that he wraps up his AE calls in sub-VIs. This is a wonderful way of solving two challenges associated with AE use. The first challenge is not being able to set important inputs to the AE as “Required”.
If we develop a wrapper VI for each type of AE call, we can designate all of the required inputs for proper operation of the AE function call as “Required”. Without using the wrapper VI to ensure the proper calling convention, the inputs required for any AE function would be required all AE calls.
Example: Suppose you have an AE that stores all of the user information in your application. Among other functions the AE includes the actions “Set User Password’ and “List all Users”. Since a “User Name” input is required for setting a users password correctly, this input would be required when attempting to get a list of all of the users with the “List all Users” action. By wrapping up the individual actions in appropriate wrapper VIs, we can set the “User Name” input as required in the “Set User Password” wrapper. The “List all Users” wrapper would not have a “User Name” input.
A second benefit of using a wrapper VI for each action of the AE is in making maintenance easier. Since each type of access to the AE is encapsulated its own VI, a search for a selected wrapper VI is a search for all actions of that type. If you know there is only one type of action that can cause a condition you are trying to modify, you can quickly find all of the code that can be affected by changes to that action.
Closing Notes
1) When using your AE remember the data is in the USR.
2) Let your data define your actions
3) Avoid super clusters
4) Hierarchies of AEs help keep your data structures simplified
5) Self initializing and recursive AE are both elegant and efficient
6) AEs do not require a While Loop.
I want to offer my appreciation to Albert Gevens and Jim Kring for their assistance in creating this blog post.
I would like to hear from you on the any or all of the following questions.
1) Do you have a process that you go through when designing AEs, what is it?
2) Does anyone use the techniques used for Normalizing Databases to AE design?
3) Do you think that a USR is required for a VI to be considered an AE, e.g. “Could use a dll call and still all it an AE?”
Post a comment, give me a call at 724.942.6330, or email me bar@dsautomation.com
Foot Notes
*LabVIEW Programming Techniques” produced by Viewpoint Systems Version 2.2 August, 2000 page 67. I believe this book was the precursor to the original version of NI’s “Advanced Applications Development Course”
**An Action Engine is generally implemented as a VI that is not reentrant to share the USR across multiple instances of the sub-VI. A reentrant VI will allocate a unique data space for each instance of the VI.
*** A “Race condition” is a term used to describe the situation were information from different sources are not consistent with each other. This term originated in the hardware of computers were address and control signals could arrive at the inputs of chips at different times resulting in the new control state applying to the old address (for example). In LabVIEW this condition exists whenever there are two writers of an object (Global, Local, etc) that are executing at the same time.